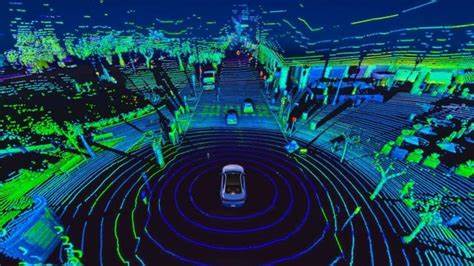
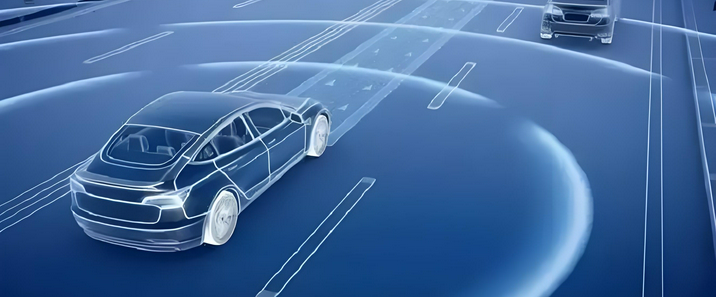
自动驾驶——即时定位与地图构建技术(Simultaneous Localization and Mapping,SLAM)自动驾驶——即时定位与地图构建技术(Simultaneous Localization and Mapping,SLAM),是一种在未知环境中进行自主导航的技术。它允许机器人或自动驾驶车辆在没有先验地图信息的情况下,通过传感器数据来同时完成两个任务:定位(确定自己在环境中的位置)和地图构建(创建环境的地图)。SLAM技术是自动驾驶、机器人导航、增强现实等领域的关键技术之一。其复杂性和创新性在于如何高效且精确地在无预知环境下实现自我定位与环境建模。这一过程不仅挑战着算法的计算效率和准确性,还要求系统具备高度的自适应能力和对不确定性因素的有效管理。