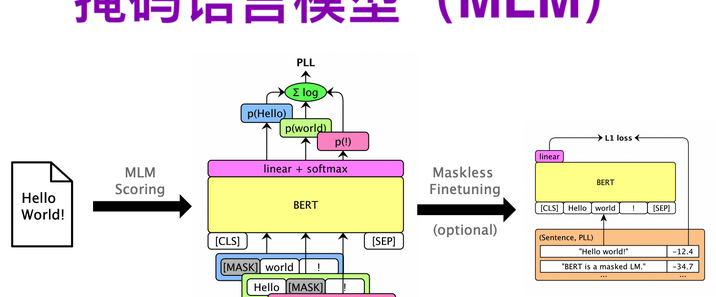
掩码语言模型(Masked Language Model,MLM)是自然语言处理(NLP)中一种重要的预训练任务,尤其在基于深度学习的语言模型中被广泛使用。它是一种自监督学习技术,让模型学习语言的语义和语法规则。一、发展历程 在 MLM 出现之前,早期的语言模型主要基于统计方法,如 ngram 模型。这些模型通过统计文本中单词出现的频率和连续 n 个单词的组合频率,来预测下一个单词或生成文本。然而,它们存在局限性,无法很好地捕捉语义信息和长距离依赖关系。例如,对于句子 "I love to play [?] in the park",简单的 ngram 模型可能仅根据前面几个单词的统计信息预测 [?] 处的单词,而难以考虑更广泛的上下文和语义信息。