尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)是一种用于图像处理和计算机视觉中的关键点检测和描述的算法。它由David Lowe在1999年提出,并在2004年进一步改进。SIFT算法的主要特点是对尺度和旋转的不变性,这使得它在图像匹配、目标识别和3D重建等领域非常流行。
一、SIFT算法主要步骤
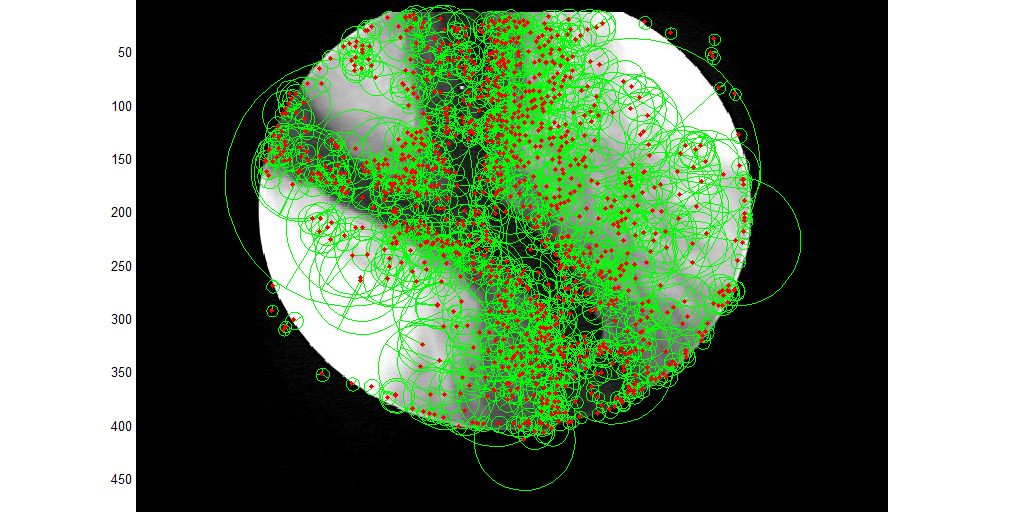
1. **尺度空间极值检测**:通过构建尺度空间(scale-space),即在不同尺度下观察图像,检测关键点。尺度空间是通过高斯模糊和下采样原始图像来构建的。
2. **关键点定位**:在尺度空间中,通过比较每个像素点与其邻域内的点(包括不同尺度和方向)来确定关键点的位置。
3. **方向赋值**:为每个关键点分配一个主方向,通常是通过计算关键点邻域内的梯度方向直方图来实现。
4. **关键点描述**:生成关键点的描述符,通常是一个向量,包含了关键点周围区域的梯度信息。这个描述符对图像的尺度、旋转和亮度变化具有鲁棒性。
5. **匹配**:使用关键点的描述符来匹配不同图像中的关键点,从而实现图像之间的对应关系。
二、SIFT算法的优点
- **尺度不变性**:通过在多个尺度上检测关键点,SIFT能够识别出在不同尺度下的特征。
- **旋转不变性**:关键点的方向赋值使得SIFT能够识别出旋转后的特征。
- **亮度和对比度变化的鲁棒性**:SIFT描述符的设计使得它对图像的亮度和对比度变化不敏感。
- **特征点的稳定性**:SIFT算法能够检测出稳定的关键点,即使在噪声和部分遮挡的情况下也能保持较好的性能。
三、商业应用案例
1. **图像搜索与识别**:SIFT算法可以用于图像搜索引擎,帮助用户通过上传图片快速找到相似的图像或相关产品。
2. **增强现实(AR)**:在增强现实应用中,SIFT算法可以用来识别现实世界中的物体或场景,从而在用户的视野中叠加虚拟信息或图像。
3. **机器人导航与地图构建**:SIFT算法在机器人领域中用于环境感知,帮助机器人通过图像匹配进行定位和路径规划。
4. **全景图像拼接**:SIFT算法能够处理不同视角和尺度下的图像,使其成为全景图像拼接的理想选择,广泛应用于虚拟现实(VR)和街景地图服务。
5. **物体识别与追踪**:在零售和安防监控领域,SIFT算法可以用于物体的识别和追踪,例如在视频监控中识别和跟踪人员或车辆。
6. **3D重建**:SIFT算法在3D建模中用于从多个2D图像中提取特征点,进而重建出3D模型,这在电影制作、游戏开发和建筑可视化中非常有用。
7. **无人机导航**:无人机使用SIFT算法进行环境映射和目标识别,以实现自主导航和避障。
8. **医学成像分析**:在医疗领域,SIFT算法可以帮助分析医学图像,比如通过比较不同时间点的图像来检测病变或进行手术规划。
9. **遥感图像处理**:在遥感领域,SIFT算法用于从卫星或航空图像中提取特征,进行地理信息系统(GIS)分析和环境监测。
10. **内容创作与管理**:SIFT算法在内容管理系统中用于图像版权检测、图像分类和图像数据库管理。
四、Python应用
Python中实现SIFT算法通常依赖于一些流行的计算机视觉库,如OpenCV。OpenCV提供了SIFT算法的直接实现,使得在Python中应用SIFT算法变得简单和高效。开发者可以通过简单的API调用来提取图像的关键点和描述符,并进行后续的图像处理任务。
尽管SIFT算法在商业应用中表现出色,但也存在一些局限性,如计算成本较高、专利限制和对图像的仿射变换不够鲁棒,以及在特征点较少的情况下匹配效果可能不佳等。随着深度学习方法的发展,一些新的算法正在逐渐替代SIFT算法在某些应用中的地位,但SIFT仍然是计算机视觉领域中的一个重要基准。