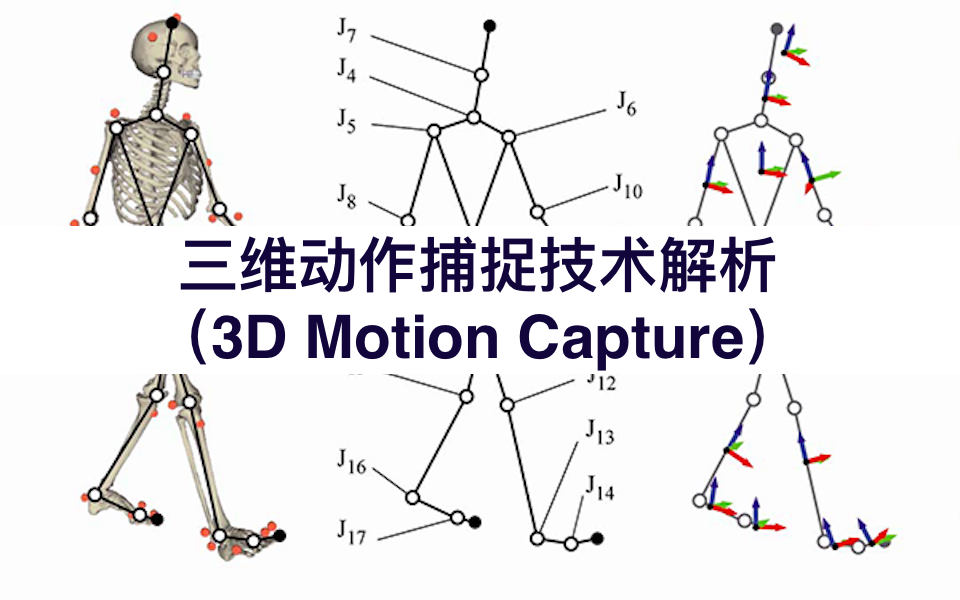
三维动作捕捉是一种通过特定设备和算法,实时或离线记录物体(尤其是人体)在三维空间中运动轨迹和姿态变化,并将其转化为数字信号的技术。它通过获取位置、速度、加速度及旋转角度等六自由度信息,实现运动的精准数字化采集与重建。
核心工作流程:
•数据采集:通过传感器或摄像头捕捉运动信号
•数据传输:将信号传输至处理系统
•数据处理:通过算法计算三维坐标和姿态
•模型重建:生成可驱动虚拟角色的骨骼动画
一、主流技术原理与类型
1.光学式动作捕捉
原理:通过多台高速红外摄像机从不同角度捕捉目标上的反光标记点(Marker),利用三角测量原理计算标记点的空间坐标。
分类:
•被动式:摄像头发射红外光,Marker反射光线形成定位(成本较低,易受环境光干扰)
•主动式:Marker内置发光元件,主动发射信号(抗干扰强,成本高)
•无标记式:利用计算机视觉算法直接识别目标特征点,无需物理标记
优势:精度高(可达亚毫米级0.08mm@120fps)、采样率高(最高1000fps)、数据稳定
劣势:设备昂贵、场地要求高、易受遮挡影响、需专业校准
2.惯性式动作捕捉
原理:基于MEMS(微机电系统)惯性传感器(IMU),通过在身体各部位佩戴包含加速度计、陀螺仪和磁力计的传感器模块,采集加速度、角速度和磁场数据,再通过积分运算和数据融合算法计算三维姿态与位置。
优势:便携灵活、不受光线和遮挡影响、可户外使用、部署快速
劣势:存在积分漂移问题(长时间使用精度下降)、绝对定位精度较低(通常厘米级)、需定期校准
3.其他技术方案
•电磁式:通过电磁场感应确定接收线圈位置,精度高但易受金属干扰,适用于微创手术导航等小空间场景
•机械式:通过机械连杆直接测量关节角度,精度高但活动受限,现已较少使用
•声学式:利用声波传播时间差计算位置,精度低且受环境噪声影响大
二、技术对比分析
在精度表现上,光学式动作捕捉优势最为突出,可达亚毫米级(0.01-1mm);电磁式次之,处于毫米级(1-5mm);无标记光学技术精度在毫米到厘米级之间波动;惯性式精度相对较低,通常为厘米级(5-10mm)。延迟方面,惯性式表现最优,仅为微秒级(1-10μs),能满足极高实时性需求;光学式延迟为毫秒级(5-50ms),电磁式延迟稍高,处于10-100ms的毫秒级区间;无标记光学的延迟则取决于算法性能,一般在50-200ms之间。
环境适应性上,惯性式凭借不受光线和遮挡影响的特性表现优异;无标记光学受光线和背景环境影响,适应性处于中等水平;光学式对环境要求严苛,需无遮挡、稳定光照的环境,适应性较差;电磁式易受金属干扰,在复杂工业环境或含金属较多的场景中适应性同样不佳。便携性方面,惯性式采用穿戴式无线设计,便携性最优;电磁式因需配备发射器,便携性中等;无标记光学需部署多台摄像头,便携性处于中等水平;光学式则需固定场地安装设备,便携性最差。
成本层面,光学式成本最高,通常在数十万至百万级别;电磁式为中高成本,价格区间在十万至数十万;惯性式属于中等成本,约为数万至十万;无标记光学成本则根据配置不同,覆盖低至中多个层级,性价比相对突出。适用场景上,光学式因高精度适合影视特效、动画制作、科研等专业领域;惯性式的便携性使其在户外体育、VR/AR、动作分析中广泛应用;电磁式适用于医疗、小型机械监测场景;无标记光学则更契合游戏、直播、轻量化应用等需求。
三、应用场景
1.影视娱乐
•电影制作:《阿凡达》《指环王》中创造虚拟角色(如咕噜姆),实现真人表演与CG完美结合
•游戏开发:捕捉角色动作、表情,使游戏角色更自然逼真,提升玩家沉浸感
•虚拟偶像/直播:实时驱动虚拟主播,实现表情和肢体动作的精准同步
2.体育科学
分析运动员技术动作,优化训练方案,预防运动损伤;评估动作效率,为运动员提供精准数据反馈;用于比赛战术分析和动作模拟。
3.医疗康复
步态分析:量化步频、步速、关节活动角度,辅助诊断和康复评估;康复训练监测:跟踪患者肢体运动恢复情况,评估治疗效果;骨科手术导航和微创手术辅助。
4.工业与机器人
机器人动作编程:通过捕捉人类动作快速生成机器人运动轨迹;产品设计:分析人体工程学数据,优化产品形态和操作方式;无人机、船舶姿态监测与控制。
5.其他前沿应用
•VR/AR交互:提供自然的人机交互体验
•生物力学研究:分析动物运动规律,为仿生设计提供依据
•刑侦模拟:还原犯罪现场动作过程
•智能监控:分析公共场所人员行为模式
四、开源项目介绍
三维动作捕捉领域的开源项目为技术研发和普及提供了重要支撑,覆盖无标记视觉、惯性数据处理、多模态融合等多个方向,满足不同场景的开发需求。
1.OpenPose(无标记视觉动捕代表)
作为加州大学伯克利分校开发的开源人体姿态估计项目,OpenPose基于深度学习技术,能够实时检测图像或视频中多个人体的关键点(包括身体、面部、手部),无需依赖物理标记。其核心优势在于支持多姿态同时识别,即使存在遮挡场景也能保持一定的识别精度,目前已更新至支持135个人体关键点检测。该项目提供C++、Python等多种开发接口,配套完整的训练和推理教程,广泛应用于动作分析、虚拟交互、生物力学研究等领域。开发者可基于OpenPose快速搭建轻量化动捕系统,例如通过普通RGB摄像头实现低成本的人体动作捕捉,适合预算有限的科研团队和中小企业进行二次开发。
2.MoveIt!(机器人与动捕融合工具)
MoveIt!是基于机器人操作系统(ROS)的开源运动规划框架,虽核心定位为机器人运动控制,但在动作捕捉数据与机器人联动方面表现突出。它支持接入光学式、惯性式等多种动捕设备的数据,通过运动学算法将人体动作转化为机器人可执行的运动轨迹,实现“人体示教”功能。该项目内置碰撞检测、运动学求解等核心模块,兼容UR、ABB等主流机器人型号,在工业机器人编程、协作机器人开发等场景中应用广泛。其开源社区活跃,定期更新功能包,开发者可借助其丰富的工具链快速实现动捕数据到机器人控制指令的转化,降低跨领域开发门槛。
3.IMU-Toolbox(惯性动捕数据处理)
IMU-Toolbox是针对惯性测量单元(IMU)数据处理的开源工具集,由学术机构联合开发,专注于解决惯性动捕中的积分漂移、数据校准等核心问题。该工具包包含传感器校准模块(可修正加速度计零偏、陀螺仪漂移)、数据融合算法(如卡尔曼滤波、互补滤波的优化实现)以及姿态解算工具,支持将原始IMU数据转化为稳定的三维姿态信息。其优势在于算法轻量化,可运行于嵌入式设备(如STM32、树莓派),适合开发便携式惯性动捕设备。工具包提供MATLAB和Python版本,配套大量测试数据和案例代码,便于科研人员验证新的融合算法或优化现有方案。
4.MediaPipe(跨平台轻量动捕方案)
由谷歌开发的MediaPipe是一款跨平台的开源机器学习框架,其中包含人体姿态、面部网格、手部姿态等多个动捕相关的预训练模型。与OpenPose相比,MediaPipe更注重轻量化和实时性,其优化后的模型可在移动端(Android、iOS)和嵌入式设备上高效运行,延迟低至数十毫秒。以其人体姿态估计模块为例,支持33个人体关键点检测,结合GPU加速技术可实现实时视频流处理。该项目提供Java、C++、Python等多语言接口,且支持与TensorFlow、PyTorch等深度学习框架无缝衔接,适合开发移动端动捕应用、AR滤镜、虚拟直播等轻量化场景。
5.DynaMo-B(多模态动捕融合框架)
DynaMo-B是一款专注于光学与惯性数据融合的开源框架,由欧洲科研团队开发,旨在结合两种技术的优势解决单一动捕方案的缺陷。该框架支持接入光学动捕设备(如Vicon)的标记点数据和惯性传感器数据,通过基于扩展卡尔曼滤波的融合算法,修正惯性数据的漂移问题和光学数据的遮挡误差。其核心功能包括数据同步、时空校准、异常值检测和融合姿态输出,配套的数据可视化工具可直观展示融合前后的姿态差异。该项目主要面向科研领域,为多模态动捕算法的研究提供了标准化的测试平台和基准模型。
五、技术发展趋势
1.多模态融合技术
将光学、惯性等不同技术优势结合,弥补单一技术局限性:
•光学+惯性:利用光学高精度校准惯性漂移,同时通过惯性解决光学遮挡问题
•多传感器融合:结合视觉、IMU、压力传感器等获取更全面的运动信息
2.AI算法赋能
•自动数据修复:智能填补标记点丢失、修正漂移问题
•姿态预测:基于物理约束优化复杂动作预估
•无标记捕捉精度提升:深度学习模型(如HRNet、ViTPose)将关键点检测准确率提升至80%以上
•实时解算:第六代动捕系统运算效率提升3倍,延迟降至0.2ms,精度达毫米级
3.硬件革新
•高分辨率摄像头(2600万像素)与高帧率(1000fps)捕捉细微动作
•轻量化、柔性传感器,提升穿戴舒适度
•水下、高温等特殊环境专用设备(如NOKOV水下镜头精度达±0.1mm)
4.应用拓展
•向移动端和消费级市场渗透,降低使用门槛
•在元宇宙、数字孪生等新兴领域发挥关键作用
•与脑机接口技术结合,探索\"意念控制\"的可能性
六、选择指南
针对不同的需求场景,需结合技术特性与实际条件选择合适的动作捕捉方案。若用于电影制作或高端动画开发,光学式(被动标记)是最优选择,其亚毫米级的超高精度能够满足精细表情和复杂动作的捕捉需求,确保虚拟角色动作的自然逼真。对于户外体育训练场景,惯性式技术更为适用,其不受场地、光线和遮挡的限制,便携的穿戴式设计可跟随运动员在各种户外环境中使用,精准捕捉大动态范围的运动数据。
医疗康复评估工作中,光学式或无标记技术较为合适,前者能精准测量关节活动角度等关键数据,为医生提供可靠的诊断依据;后者则因无需佩戴标记点,提升了患者在康复过程中的舒适度,便于长期监测。游戏开发和虚拟直播场景对成本和部署效率有较高要求,惯性式或无标记技术性价比突出,既能满足动作实时同步的需求,又能降低设备投入和场地布置成本。
科研和生物力学研究注重数据的精度和可重复性,光学式(主动标记)技术凭借稳定的性能和高精度数据输出,成为该领域的理想选择。对于预算有限的轻量化应用,无标记技术或光学与惯性结合的混合方案是更佳选择,通过算法优化弥补单一技术的不足,在控制成本的同时保证基本的动作捕捉效果。
七、总结
三维动作捕捉技术已从好莱坞特效工具发展为连接物理世界与数字世界的关键桥梁。目前光学式凭借高精度在专业领域占据主导(市场份额约58%),而惯性式和无标记技术则以灵活性和低成本在新兴应用中快速普及。开源项目的发展进一步推动了技术的民主化,使中小企业和科研团队能够以更低成本参与到动捕技术的研发与应用中。